
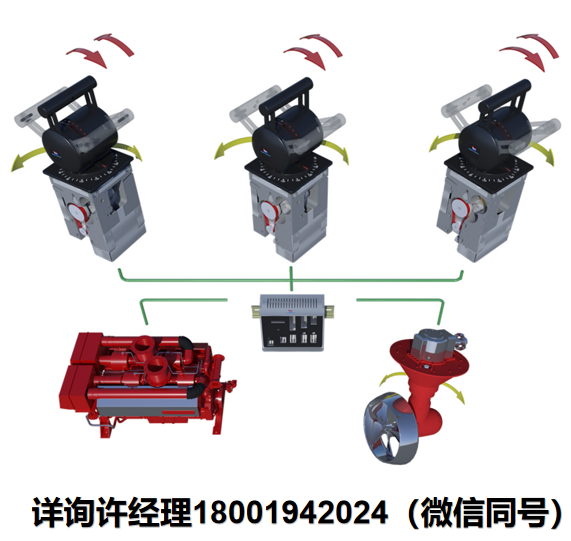
ELECTRIC SHAFT SYSTEM-電動軸系統
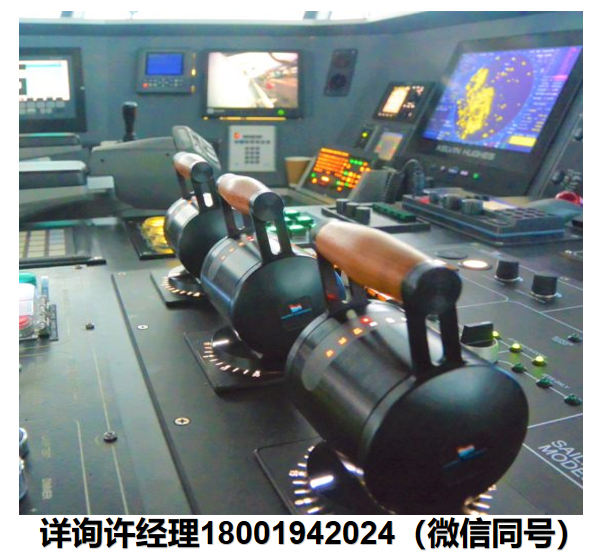
Kwant控制桿主要用于船舶推進裝置的電子遙控,通常由發動機/螺旋槳/變速箱/離合器子組件組合而成。遙控是從駕駛臺(WH前部、WH后部、左舷側或Stbd側)進行的。為了實現這一點,杠桿配備了信號傳輸發動機轉速,離合器方向等。連接到推進裝置控制系統。
電報系統
如果遙控(RC)系統出現故障,可以切換到電報模式。現在,相同的操縱桿用于從駕駛室向發動機控制室(ECR)或發動機室(ER)發送電報命令,無論哪一個被選作當前應答位置。警報將會響起,直到命令被確認。推進裝置現在由ECR或ER操縱桿遠程控制,或者在ER操縱桿沒有遠程控制發射器的情況下由手動控制。

電氣軸系統
電氣軸系統的目的是同步所有連接的控制單元的操縱桿,主要是在主駕駛臺和駕駛臺側翼。它提高了易用性,增加了緊急情況下的安全性,因為可以從任何連接的操作位置直接進行控制。同步能夠在不改變推進和/或航向控制信號的情況下切換操作位置(無碰撞接管)。第二個優點是,提供這些信號的發送器只需要在一個控制單元上,因為所有的杠桿將同時移動。為了實現同步,控制單元配備了伺服電機。電子電路將負責驅動這些電機,以及處理接管請求。可通過發光按鈕或其他系統的潛在自由觸點實現接管。
電動軸系統規格參數:
這款最新一代的電動軸系統基于步進電機驅動杠桿和CAN總線技術。它將傳統上分離的電報和電氣軸系統合并為一個組合系統,從而大大提高了靈活性,減少了安裝時間和布線成本。步進電機的應用引入了許多功能,如可編程棘爪、觸覺反饋和非常精確的微調,這些都是傳統DC電機技術無法實現的。CAN總線是一種廣泛分布且堅固耐用的串行總線系統,它植根于汽車工業,在汽車工業中必須滿足極其苛刻的要求。電子設備已經完全分布在操作位置上,從而取消了傳統的中央機柜。
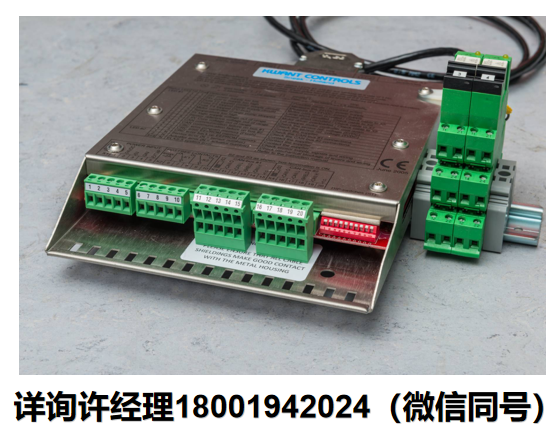
將控制單元連接到CAN總線的電子模塊被稱為CUBI,簡稱C控制Unit toB我們I界面。與模塊通信的基礎是CAN-open協議。CUBI模塊包含一個印刷電路板,可以處理兩個伺服電機控制器和八個數字輸入和輸出,同時提供兩個can總線收發器用于總線冗余。根據EN-50022A,CUBI模塊有一個防海水不銹鋼外殼,可以很容易地在35/7.5毫米DIN導軌上點擊。聚氨酯涂層保護印刷電路板的敏感部分。
為了連接到船上的電纜,使用可插拔連接器。這簡化了模塊的安裝和更換。帶有D-Sub連接器的電纜用于模塊的杠桿側。
每個Elas-5系統最多可以處理八個控制單元(節點),最多可以將四個這樣的系統連接在一起,從而允許最多32個控制單元完全同步運行。
Elas-5系統已通過以下主要分類局的型式認證:ABS、BV、CCS、DNV、GL、LRS、NKK、RINA和RMRS。
電動軸系統選項:
- Central take over中央接管
在標準系統中,主操縱桿的選擇是通過一個簡單的發光按鈕完成的,該按鈕直接連接到相應的CUBI模塊(=本地接管)。如果位置接管必須通過另一個控制系統來實現,按鈕可以用潛在自由觸點(每個位置一個)來代替,這些觸點都可以連接到單個CUBI模塊。 - Tandem mode.串聯模式
也稱為“一桿模式”,該選項允許操作員僅用一個桿控制多達四個推進裝置,以提高操作舒適性。為了實現這一點,端口側和Stbd側系統的CAN總線通過一個隔離的CAN中繼器連接在一起。 - Electrical fine adjustment電氣微調
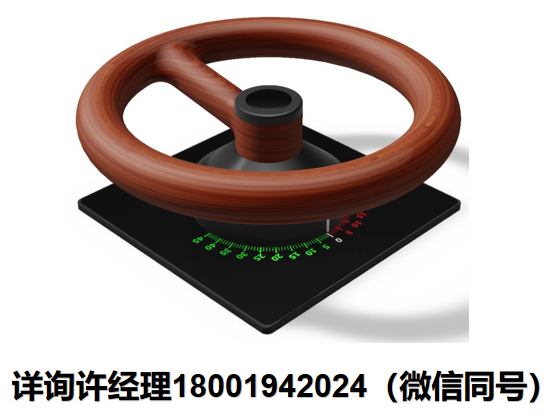
對于像護航航行這樣需要非常精確地設置引擎速度或螺旋槳螺距的活動,手動操作桿通常太過自然。為了克服這一問題,該系統可以擴展為帶有電子微調按鈕,該按鈕可以非常緩慢地將控制桿向所需方向移動。CUBI模塊現在使用改進的微步進來實現最佳精度。 - Haptic feedback觸覺反饋
為了限制控制桿的允許操作范圍,可以激活所謂的“觸覺反饋”來防止控制桿移動到該區域之外。伺服電機將試圖推回杠桿,導致杠桿振動,讓操作員知道他正在離開安全操作區域。
- Sub-telegraph commands子電報命令
最多可連接三個發光按鈕來傳輸和確認所謂的子電報命令,如“袖手旁觀”、“發動機結束”和“海上”。子電報命令總是從駕駛臺發送到控制室或急診室。間歇性聲音警報(1 Hz)用于區別于推進電報警報。
- Programmable detents.可編程棘爪
當控制單元處于從模式時,用于移動控制桿的伺服電機也可用于在控制單元處于主模式時產生機械制動(可觸知的停止)的感覺。默認情況下,空檔位置有一個卡位,其他位置可以編程,例如離合位置或最佳發動機轉速。另一個例子:當在電報模式下,所有的命令在每個命令欄的中間都有一個定位點。每個電機最多可編程16個棘爪。 - External signals.外部信號
外部0-20mA信號的兩個輸入可用,例如來自操縱桿或速度導向系統。這允許自動控制桿與外部信號源對齊,并提供從控制桿到外部控制的無擾動切換,反之亦然。