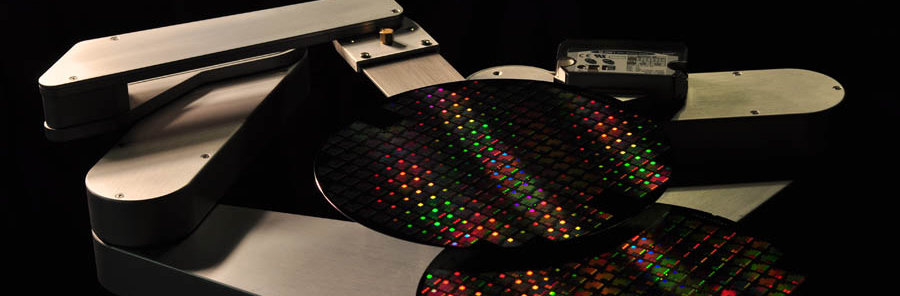
Logosol 晶圓處理平臺包含源自 30 多年半導體自動化經驗的各種產品和服務。技術范圍從硬件、軟件和機械設計到制造、集成和應用工程。該公司與晶圓處理機器人和預對準器相關的設計解決了半導體晶圓廠中需要直接替換傳統產品的應用,以及 OEM 制造商新開發的資本設備中的自動化材料處理。這些產品線采用了 Logosol 完全擁有和控制的技術,包括運動控制電子、晶圓處理固件、軟件工具、實用程序和機械設計。整個技術范圍的可用性允許極高水平的無縫集成、可制造性、可靠性和成本效益。
機器人許可
Logosol 長期以來一直將其用于晶圓處理自動化的專有技術授權給各種實體。這些產品包括各種機器人尺寸和手臂配置,作為靈活的模塊化自動化平臺的一部分。被許可方受益于公司在半導體自動化方面的廣泛專業知識、經過驗證的產品和解決方案,以及在該領域 30+ 年的專業知識。我們公司提供全面且高度可定制的統一技術,涵蓋您項目的各個方面,從機械設計到運動控制電子設備、固件、軟件工具和實用程序。無論您需要簡單還是復雜的解決方案,我們都可以定制我們的技術以滿足您的特定要求。您將可以完全控制您的項目,而無需依賴第三方添加。我們的技術設計靈活、可擴展且可靠,可確保高性能和高質量標準。該公司不僅提供制造許可證和文檔,還提供構建整個產品所需的機器人控制器、電源和特定電子模塊。此外,Logosol 提供最全面的晶圓預對準器系列,可與所有獲得許可的晶圓處理機器人無縫集成。
機器人控制器
LRC-x31g3 是三軸、四軸和五軸機器人控制器,帶有集成的 CPU 板和功率放大器,專為需要精確控制旋轉或線性無刷電機的應用而設計。它們可以用作內置控制器或外部控制器。LRC-x31g3 通過主機 RS-232 或 10/100 Base-T 以太網接口進行控制。其他外部設備可以使用 Logosol 分布式控制網絡擴展接口無縫連接。LRC-x31g3 配備了各種安全功能,例如輸出和電機短路保護、欠壓關閉和編碼器存在控制、智能停止功能,以避免在機器外部停止或斷開電源時機械臂掉落。先進的運動控制技術支持非常高分辨率的編碼器,可實現卓越的多軸軌跡生成。硬件輔助位置鎖定在用于動態晶圓對準時提高了精度。
運動控制框架
MCL5 是 Logosol 專有運動控制軟件包的第五代產品,提供特定領域的編程語言和多任務實時解釋器。這是一個專用于設計機器人控制應用程序的編程框架。MCL5 可執行文件包括運動控制器和 I/O 模塊的集成、各種機器人運動學的實現、對復雜軌跡運動的支持以及系統完整性的監控。該可執行文件還包括一個實時多任務腳本解釋器。它允許設計特定于應用程序的腳本,這些腳本可用于協調機器人運動的排序并實施自定義主機通信協議。腳本語言由一組保留字定義,并且具有類似于 C 編程語言中的表達式語法。