這個(gè)三重功能傳感器(加速度、角速度和姿態(tài))是一種IMU“慣性測(cè)量單元”和雙軸傳感器,可用于加速度、角速度和傾斜測(cè)量,在動(dòng)態(tài)條件下,繞其X軸的橫滾和繞其Y軸的俯仰,帶有30 Hz的帶寬。
這個(gè)傳感器的創(chuàng)新在于它能夠在動(dòng)態(tài)條件下(振動(dòng)、恒定加速度等)測(cè)量這些傾斜,保持極佳的精度。
這是通過(guò)使用3個(gè)MEMS陀螺儀和3個(gè)MEMS加速度計(jì)以及專(zhuān)利的卡爾曼濾波算法實(shí)現(xiàn)的。
所有慣性傳感器信息,橫滾和俯仰角度以及狀態(tài)(錯(cuò)誤或內(nèi)部故障、傾斜測(cè)量限制的溢出)都通過(guò)CAN總線(xiàn)和RS485 Modbus RTU協(xié)議提供。
除此之外,橫滾和俯仰角度也以模擬格式(0-5VDC)提供。
雙軸傳感器應(yīng)用領(lǐng)域
- 國(guó)防:炮塔穩(wěn)定化、天線(xiàn)定位
- 土木工程車(chē)輛
- 火車(chē)位置
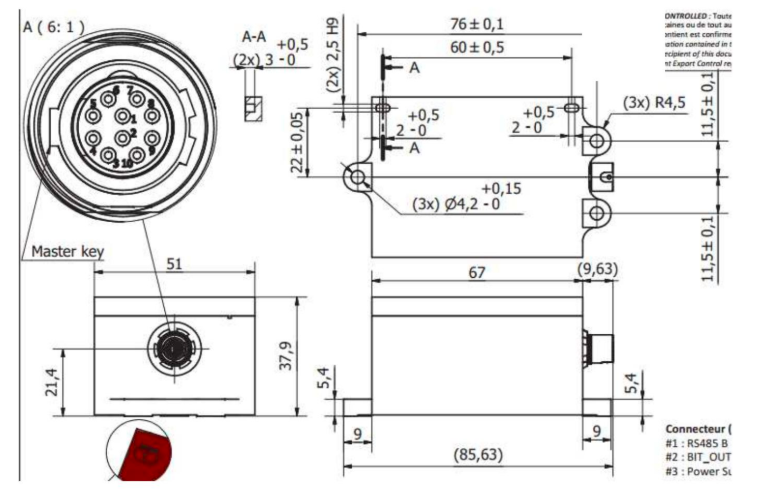
雙軸傳感器外形尺寸
雙軸傳感器規(guī)格
除?另有說(shuō)明,所有規(guī)格均在 25°C 下給出。


注意事項(xiàng):
(1):帶寬定義為傳感器靈敏度降低超過(guò)3dB的頻帶。
(2):偏置是在制造過(guò)程中為測(cè)得的加速度(或角速度)為0g(或0°/s)時(shí)調(diào)整的傳感器輸出;該值還包括傳感器的非重復(fù)性。
(3):非線(xiàn)性誤差定義為輸出最大誤差與最佳擬合線(xiàn)之間的比率與傳感器的全量程范圍之間的比率。
PE = 全量程。例如,對(duì)于±2g型號(hào),PE=4g。
FS = 全量程輸出。例如,對(duì)于±2g型號(hào),F(xiàn)S=4g。