RF1010SS 3D激光分選機(jī)
該測(cè)量設(shè)備專為非接觸式測(cè)量物體的幾何參數(shù)而設(shè)計(jì),特別是用于向日葵種子,是一套獨(dú)立的軟硬件系統(tǒng)。
設(shè)備的技術(shù)特性可根據(jù)具體任務(wù)進(jìn)行調(diào)整。

3D 激光分選機(jī) RF1010SS
掃描區(qū)域:?300×400 毫米
精度:?±0.1 毫米
規(guī)格:
| 參數(shù) | 價(jià)值 | |
| Y 軸掃描范圍,mm | 400 | |
| 掃描范圍,Z 軸,mm | 300 | |
| 掃描范圍 Х(測(cè)量開(kāi)始,Z 軸),mm | 130 | |
| 掃描范圍 Х(測(cè)量末端 Z 軸),mm | 240 | |
| 測(cè)量精度,X,Z 軸,um | ±150 | |
| 測(cè)量精度,Y 軸,um | ±20 | |
| 采樣率,配置文件/秒 | 250 | |
| 速度,mm/s | 25 | |
| 參數(shù)盡在掌握 | 長(zhǎng)度、寬度、高度 | |
| 尺寸,mm | 730х415х180 | |
| 重量,kg | 40 | |
| 電源 | 交流電源,采樣率 (50 ± 1) Hz, 標(biāo)稱功率 220,允許應(yīng)力 ±10 %。 | |
| 功耗,W | 50 | |
| 環(huán)境條件 | 環(huán)境溫度:+1..+350С 相對(duì)濕度 25- 65% | |
工作原理:
該機(jī)器的工作基于物體/物體的 3D 激光掃描原理,隨后構(gòu)建 3D 計(jì)算機(jī)模型并從模型中確定幾何參數(shù)。
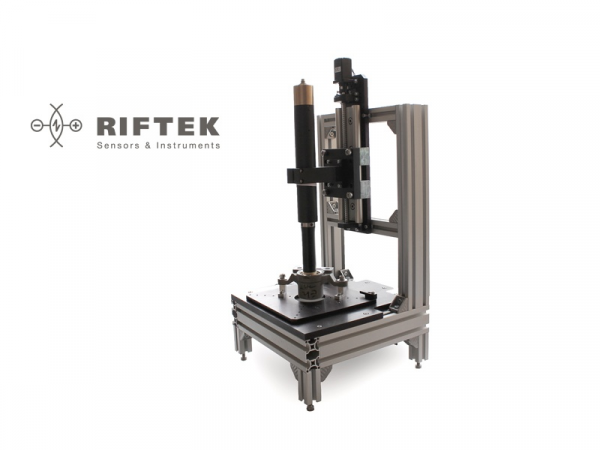
機(jī)器結(jié)構(gòu)設(shè)計(jì)如下圖所示。
該機(jī)器由工作臺(tái)1組成,其中框架結(jié)構(gòu)2位于導(dǎo)向裝置3上。安裝在導(dǎo)軌 3 上有一個(gè)帶有激光掃描儀 5 的托架 4。轎廂 4 由步進(jìn)電機(jī) 6 通過(guò)滾珠絲杠組件(未顯示)驅(qū)動(dòng)。在托架 4 的極端位置有限位開(kāi)關(guān)(未顯示)。所述框架結(jié)構(gòu) 2 上安裝有指示單元 7。在機(jī)器的側(cè)板上,有一個(gè)電源連接器 8 (220V) 和兩個(gè)用于以太網(wǎng)連接的網(wǎng)絡(luò)插孔 9。通過(guò)網(wǎng)絡(luò)交換機(jī) 11 將本機(jī)連接到 PC 10。

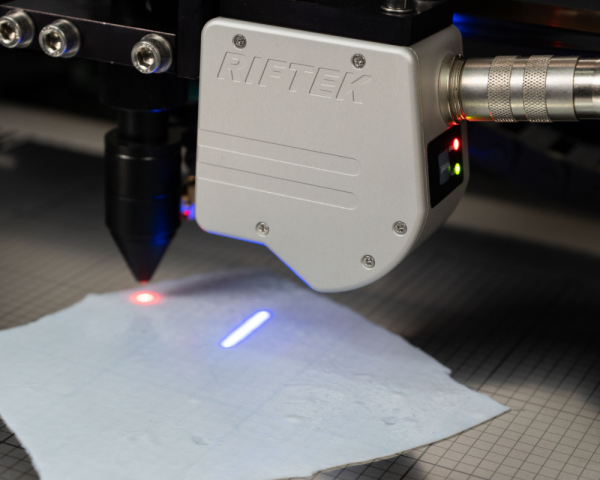
掃描儀5的激光輻射12形成一條線13,并被投射到要控制的對(duì)象所在的工作臺(tái)1上。激光線長(zhǎng)度對(duì)應(yīng)于工作臺(tái)寬度。位于工作臺(tái)上的物體的輪廓(截面輪廓)的結(jié)果圖像由掃描儀信號(hào)處理器分析,該處理器計(jì)算沿物體上激光線的多個(gè)點(diǎn)中的每一個(gè)點(diǎn)到物體的距離(點(diǎn)的 Z 坐標(biāo))(點(diǎn)的 X 坐標(biāo))。
本機(jī)的工作原理如下:
安裝在托架上的激光掃描儀沿工作臺(tái) 1 移動(dòng),移動(dòng)方向?yàn)樽鴺?biāo) Y。激光掃描儀沿步進(jìn)電機(jī)驅(qū)動(dòng)器定義的 Y 坐標(biāo)以固定的規(guī)則線性間隔確定物體輪廓點(diǎn) (X、Z) 的坐標(biāo)。結(jié)果,掃描區(qū)域的 3D 計(jì)算機(jī)模型以具有已知坐標(biāo)(X、Y、Z)的點(diǎn)云的形式獲得。物體所需的幾何參數(shù)是根據(jù)生成的 3D 模型計(jì)算得出的。