RIFTEK,ISD-3,ISD-5,速度和距離傳感器,非接觸式測量移動表面和物體的速度和長度
這些傳感器用于非接觸式測量移動表面和物體的速度和長度,例如金屬絲、帶材、管子、纖維、薄膜、紙張、熱鋼和車輛。
該系列包括兩種型號:
ISD-3 — 基于物體圖像的光柵空間濾波;
ISD-5 — 基于激光多普勒干涉儀
型號:
ISD-5
- 激光多普勒振動儀
- 工業應用于冶金、電纜生產、紡織面料

ISD-3
- 物體圖像的柵格空間過濾
- 任何表面的可靠測量
- 汽車和鐵路應用

規格:
光學速度和長度傳感器ISD-3系列規格
| 因素 | 值 | 備注 |
| 參數 | 值 | 注釋 |
| 速度范圍 | 0.2-250公里/小時 | TTLout為400Hz/m/s。其他要求 |
| 速度精度* | <±0,15?% RMS | 在試驗臺(跑步機)上以18,38 km/h的速度測定 |
| 絕對距離精度* | <±0,1?% RMS | 在S >100米處校準后 |
| 測量頻率 | 34.5赫茲或47.5赫茲 | 用戶可調,(最大80赫茲,參見第10.3節。詳情見下文) |
| 到道路的標稱距離和公差(工作距離范圍) | 35 15厘米或50 20厘米** | 應要求提供其他服務 |
| 系統電源(公差) | 12V標稱電壓(11-14.5伏)*** | |
| 系統功耗 | 傳感器頭:20重量 處理器單元:1.5重量 | |
| 傳感器頭工作溫度范圍 | -20…+50?С | |
| 傳感器+安裝支架的重量 | 280克+120克 | 沒有電纜 |
| 處理器單元的重量 | 350克 | |
| 傳感器尺寸 | 55×205毫米+照明器 | 見圖2 |
| 處理器單元尺寸 | 120×100×35毫米 | 不帶連接器 |
| 傳感器電纜長度 | 5米 | 根據要求最多10米 |
| 系統電源電纜長度 | 2米 | 根據要求最多10米 |
| 環境傳感器頭部保護 | IP67 | |
| 磁性固定工具 | 4塊磁鐵x 16公斤強度 | 選項,見圖2 |
| 控制器單元輸出: | ||
| 模擬輸出頻率輸出數字輸出 | 速度,最大40毫伏/(米/秒)3V。長度,400脈沖/米(=速度400赫茲/(米/秒),彎曲0-3伏,TTL兼容,最高200千赫。以太網(UDP協議): 測量數量、速度、長度、 | 典型值,用戶可調整(見下面的軟件描述)。DAC和頻率分辨率——12位其它要求 |
| 物理數據延遲 測量頻率時,毫秒 34.5赫茲 47.5赫茲 | 15 | 穩定=測量時間,不求平均值。 |
| 基礎軟件 | —通過以太網讀取數據、可視化和保存數據的程序; —傳感器診斷程序 —讀取數據示例(LabView 8.2.1及更高版本) —通過以太網讀取數據的動態庫(DLL) —通過任何互聯網瀏覽器配置傳感器參數 | 詳見下文。可以根據要求定制軟件。 |
*校準后放在物體上,以消除安裝軸線誤差。
**對于典型路面。在平坦且無對比度的表面上,實際上限可能更小。
***僅受照明燈限制,因為它直接由電源供電。處理器單元和傳感器電子設備有一個單獨的+5V線性穩壓器,公差高達35 V。
激光速度和長度傳感器ISD-5系列規格
| 參數 | ISD-5 標準 | ISD-5 微型 | 備注 |
| 速度范圍,米/秒 | 0,02?— 20 | 0,005?— 5 | 典型值。標稱工作距離越小,最小和最大速度范圍越小。 |
| 速度精度*,% RMS | 0,07 0,02 | 0,15 0,05 | 無信號平均 平均時間為0.2-0.3秒, 速度大于1米/秒時 |
| 長度精度*,% RMS | <±0,05 | <±0,1 | |
| 測量頻率,赫茲 | 16?— 54 | ||
| 到物體的標稱距離(公差),сm | 10, 20, 30, 50, 75, 100) | 10,15, 20 | 可在訂購時注明 |
| 距離公差 | 標稱值的20-25% | 取決于表面(在信號減弱的范圍邊緣) | |
| 發射器類型 | 可見光或紅外可見光激光器,5-120毫瓦 | 可見光c.v .激光器,< 5 mW | 3B級— 3R |
| 電源,V | 12 (8?— 14 ) | 傳感器和控制器單元中的內部線性穩壓器+5V。 | |
| 功耗,重量: 傳感器 控制器單元 | 0,5?— 2 | 0,5 | |
1 | |||
| 溫度工作范圍 | +15…+50 | -10…+50 —帶主動熱穩定(可選):50..+80 \uс,帶保護空氣冷卻外殼(可選)。 | |
| 傳感器重量,g | 320 | 70 | |
| 傳感器尺寸,毫米 | 85×79×46 | 58×43×30 | 不帶連接器、混合孔和固定孔(見下圖) |
| 從傳感器到控制器單元的電纜長度,v | 1、8或3 | 使用帶DB9連接器的標準電纜RS-232或VGA。要延長長度,可以按順序連接電纜。 | |
| 傳感器環境保護 | IP67 | ||
| 控制器單元: | |||
| 重量,克 尺寸,毫米 | 350 | ||
| 模擬輸出頻率輸出數字輸出 | 速度,最大150毫伏/(米/秒)3V。長度,2000脈沖/米(=速度2000赫茲/(米/秒),彎曲0-3伏,TTL兼容,最高200千赫。以太網(UDP協議) | 典型值,用戶可調整(見下面的軟件描述)。ADC和頻率分辨率——12位其他要求 | |
| 物理數據延遲 測量頻率時,毫秒 54赫茲 16赫茲 | 9 | 穩定=測量時間,不求平均值。 | |
| 基礎軟件 | —通過以太網讀取數據、可視化和保存數據的程序; —傳感器診斷程序 —讀取數據示例(LabView 8.2.1及更高版本) —通過以太網讀取數據的動態庫(DLL) —通過任何互聯網瀏覽器配置傳感器參數 | 詳見下文。可以根據要求定制軟件。 | |
*剔除傳感器安裝的幾何誤差所需的預校準。
原理:
非接觸式速度測量原理非常簡單。最原始的“工具”就是人的眼睛。每個人都可以通過快速掃視鐵路車廂或汽車窗戶來評估物體的運動速度。大腦會處理這個信號,評估到某個物體的距離以及其角速度,或僅僅依賴生活經驗。傳感器用于評估相同的參數,但精度更高。
首先,讓我們考慮激光傳感器,因為它的設計更簡單。為了實現這一點,需要一個移動的物體,一個光源(否則什么都看不見),以及一個由透鏡和光電探測器組成的光學系統,用于注冊反射信號。物體表面在顏色和光澤上是不均勻的,因此,當物體移動時,光電探測器將注冊與速度成正比的信號頻率。該頻率的典型值由光電探測器的注冊區域的線性大小和物體穿過該區域所需的時間來定義。因此,問題似乎已經解決,但精度仍有待提高。光學系統注冊了所謂的低頻信號。為了提高測量精度,需要縮小由移動物體生成的頻率譜。這可以通過空間濾波器來實現(這一術語與光柵光學傳感器相關)。雖然激光傳感器用于創建條紋(干涉)圖案,即物體在激光光束(檢測區域)內的周期性調制。由于激光輻射的相干性,所有光子在光束中是相位一致的,初始光束需要分成兩束,并通過角度重新合并。這樣會形成一個空間濾波器。
現在,任何物體輪廓或顏色的變化通過該結構濾波器時,會生成一個反射信號,其強度以以下頻率調制:照明周期 – 穿越速度。信號的頻譜隨著生成的周期數而變窄(周期越多,頻譜越窄)。單一的輪廓或顏色變化將不僅生成一個脈沖,而是多個脈沖(脈沖組),脈沖的數量由條紋圖案的周期數決定。例如,實際上,如果光束直徑為5毫米,而條紋周期為0.05毫米,則會生成100個光束,并相應地產生脈沖組。考慮到頻譜比上述低頻信號縮小了約100倍,這個信號現在就不再連續,而是中斷的,稱為偽信號。值得注意的是,通常20到30個光束就足以達到0.1%或更高的測量精度。
在光學傳感器中,物體通過均勻光源(燈泡或LED)照射,并且傳感器內部有周期性紋理(圖案)。這為圖案提供了額外的保護(例如滑雪橇與雪車的對比),但也帶來了許多問題,包括頻率響應(注冊信號頻率與物體速度之間的比例因子,以Hz/m(m/s)表示)與物體距離的依賴性。提前說明,這個問題已經得到了有效解決。
激光和光學速度傳感器的詳細分析(空間濾波器生成方法、信號處理方法等)可以在專著中找到。理論部分包含了約200頁的內容。然而,目前尚無實際指南用于制造能夠在真實惡劣條件下(如溫差較大、表面種類不同或測量過程中距離變化)工作的傳感器。
全球有少數幾家實際生產非接觸式傳感器的制造商。大約有10家激光傳感器制造商和不到10家光學傳感器制造商。本文將介紹這兩種類型的傳感器。
傳感器設計的主要特點。激光傳感器采用基于波前分束原理的原始光學單體結構。它提供了一個穩定的條紋圖案,具有抗溫差的能力,并且在物體的較遠距離下,光束的傳播差異為零,確保在廣泛的距離范圍內最大光束偏移。此外,無需調整光學塊。傳感器接收圖案系統的光學圖示完全消除了測量速度與物體距離的依賴性,從而保持了較高的光學照射功率。
最新的微電路和微控制器與信號處理器被用于硬件信號處理,使接收模擬電子產品能夠進行高頻率精確的速度測量,并實現各種輸出模擬、頻率和數字信號。制造了一系列適用于工業應用的傳感器,標準物體距離從15到130厘米,測量速度范圍從0.01到100 m/s,適用于車輛(詳見ISD-3和ISD-5的詳細說明)。
需要注意的是,這兩種傳感器根據測量的速度(速度積分時間)來測量里程(實際上需要的長度)。也就是說,能夠獲得的測量精度(即傳感器在測量頻率方面的能力)已經達到了其實用極限,實際上已經超出了所需需求。因此,技術數據中規定了長度測量精度小于0.1%。然而,這個參數依賴于長度本身,并且能夠獨立檢查這種精度(正如下面給出的例子所示,但實際測量可以更精確)。因此,主要的重點應該放在測量的可靠性上,即設備應能在不同條件和表面類型下正常工作。
另外,關于在標準工業任務下的距離測量,提供以下幾點說明。假設有一個長的移動物體(金屬帶、玻璃板、布料等),它需要被切割成特定長度的部分。當達到該長度時,傳感器應向執行器發出信號。假設有一個數字輸出(以太網、USB),可用于當前測量長度的讀取。例如,在測量頻率為50 Hz且物體速度為1 m/s的情況下,當前長度增量為(1 m/s)/(0.02秒)= 2厘米。但是,這可能不足夠。然而,有一個長度脈沖輸出,其比率為1000 Hz每1 m/s或每米1000個脈沖。這個輸出頻率每秒更新50次,即無論速度如何,測量的距離增量將為1毫米。顯然,這個參數可以設置為每米10000個脈沖,換句話說,這些傳感器的長度測量精度被認為是完美的,最終的精度僅受切割工具規格的限制。
下面是一些傳感器應用的例子,帶有精度評估和測量頻率。
ISD-5激光傳感器在道路上的應用測試。
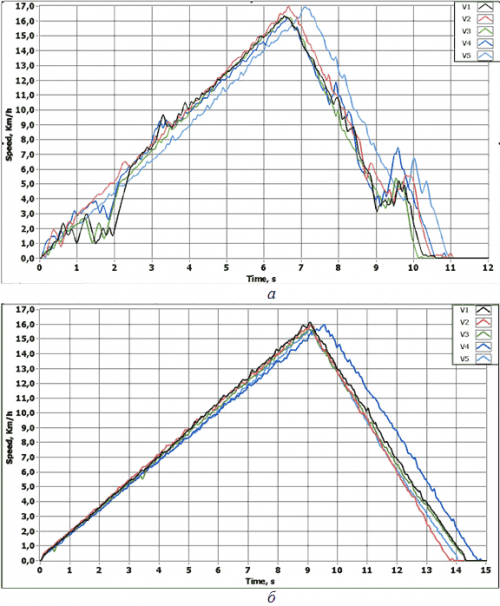
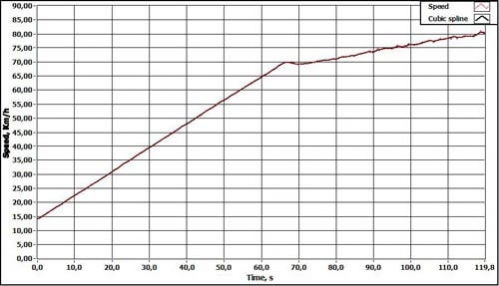
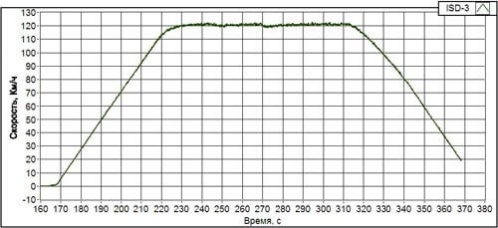
傳感器安裝的近似高度為50厘米(允許的限度為35到65厘米)。測量頻率為54.2 Hz,速度測量范圍為0.02–110 km/h。安裝傳感器的車輛在一條1公里長的賽道上行駛(在城市道路上,晴天,環境溫度為-7°C)。車輛的速度變化(0–50 km/h),并有幾次停車。測量結果根據三圈的長度定義——1055.740米、1056.244米和1055.33米,即考慮到路線不完全重復,測量頻率低于0.05%。

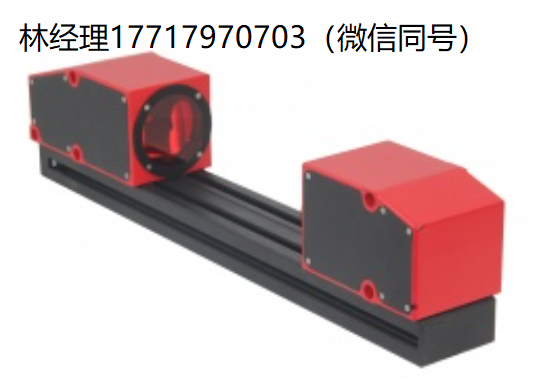
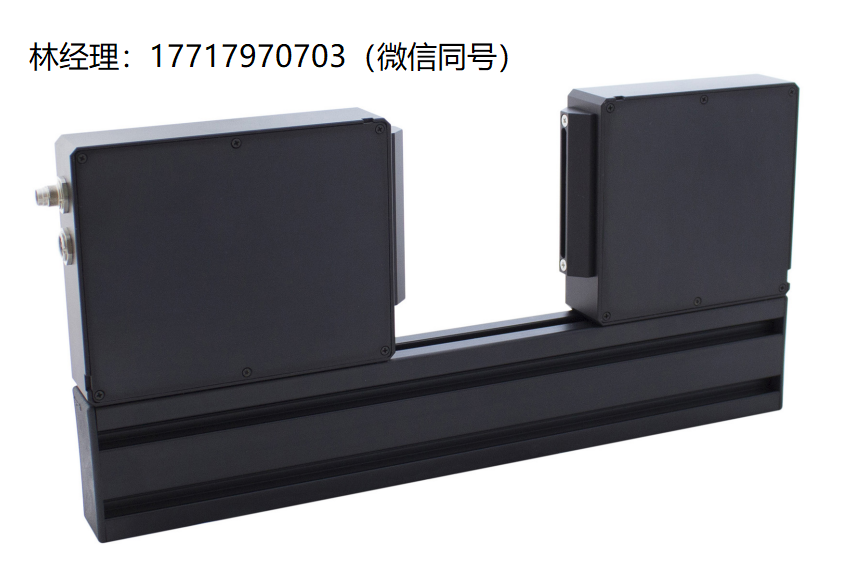
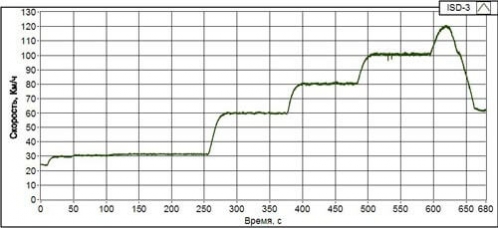
兩個傳感器,光學傳感器和激光傳感器一起使用。它們如圖1所示安裝在一輛車輛上。ISD-3傳感器的安裝名義高度為離地面50厘米,而ISD-5激光傳感器的安裝名義高度為130厘米,但實際安裝高度為100厘米。在一段平直的瀝青路面上進行四圈測試(每個方向各兩圈),測試路段長度大致相等。測試完成后,評估了兩個傳感器的相對測量差異。結果見表1。
表1. 光學傳感器ISD-3和激光傳感器ISD-5在同一路段的平行測量結果
ISD-5.
| Lap No. | ISD-316, m (measurement 23.6 Hz) | ISD-505, m (measurement 40.6Hz) | Relative difference (V3/V5-1)*100 |
| 1 | 1345.68 | 1345.01 | -0.05 |
| 2 | 1394.01 | 1395.08 | 0.07 |
| 3 | 1382.51 | 1382.73 | 0.016 |
| 4 | 1345.14 | 1343.06 | -0.15 |
| Average relative difference | 0.03±0.1% | ||











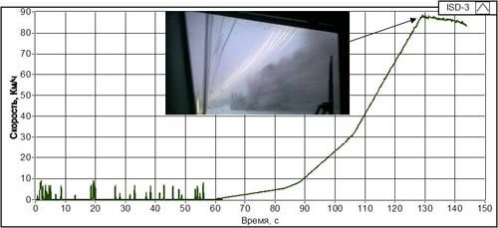
 暴風雪以恒定的速度行駛著。
暴風雪以恒定的速度行駛著。





RIFTEK,ISD-3,ISD-5,速度和距離傳感器,非接觸式測量移動表面和物體的速度和長度
http://ydzhly.com/riftek/ISD-3,ISD-5/