US digital編碼器,編碼器的分辨率,精度,精確度,在為運(yùn)動(dòng)控制系統(tǒng)選擇編碼器時(shí),您會(huì)面臨許多技術(shù)術(shù)語(yǔ)。可用的數(shù)據(jù)量可能令人不知所措。哪些關(guān)鍵術(shù)語(yǔ)應(yīng)該首先關(guān)注,哪些可以稍后再考慮?
本文探討了三個(gè)值得您關(guān)注的重要概念:分辨率、精度和精確度。
乍一看,這三個(gè)術(shù)語(yǔ)似乎意思相近。您可能會(huì)懷疑它們是否可以互換;事實(shí)上,許多人確實(shí)將它們視為可以互換的術(shù)語(yǔ)。畢竟,如果編碼器具有高分辨率,這是否意味著它是精確的?如果它是精確的,那么它一定也是準(zhǔn)確的,對(duì)嗎?(請(qǐng)注意:這兩個(gè)問(wèn)題的答案都是否定的。)
實(shí)際上,這些術(shù)語(yǔ)是相互獨(dú)立的。每個(gè)術(shù)語(yǔ)都指代編碼器的特定特性,它們不能互換。為了澄清任何混淆,我們將首先解釋分辨率在增量編碼器中的含義,然后指出線性和絕對(duì)編碼器的不同之處。接著我們將討論精度,最后是精確度。在此過(guò)程中,我們將提供一些建議,幫助您利用每個(gè)術(shù)語(yǔ)的知識(shí)做出最佳的編碼器選擇,并在編碼器安裝后如何校準(zhǔn)系統(tǒng)。
分辨率
在數(shù)學(xué)、科學(xué)和工程中,分辨率指的是可以測(cè)量或觀察到的最小距離。
增量編碼器與分辨率
制造增量編碼器時(shí),制造商會(huì)在磁盤(pán)上創(chuàng)建一個(gè)圖案。該圖案將磁盤(pán)劃分為不同的區(qū)域。例如,一種常見(jiàn)的圖案是在透明磁盤(pán)上印刷的線條和窗口。
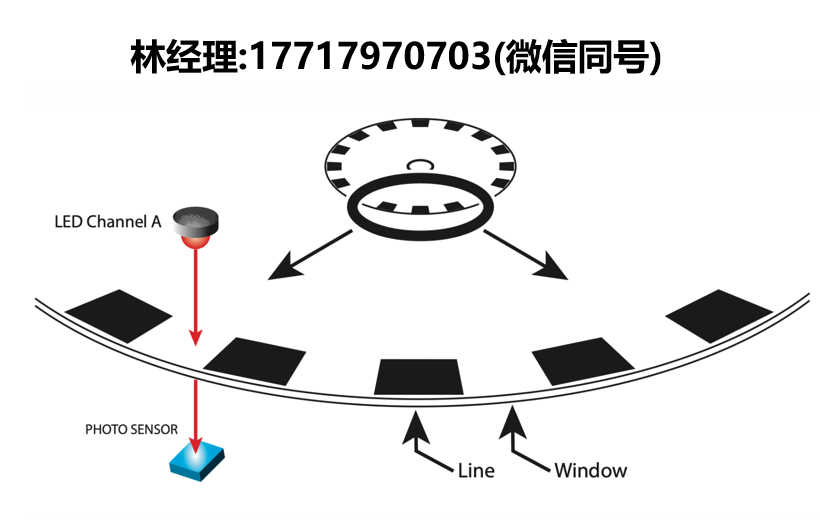
當(dāng)LED將光線投射到磁盤(pán)上時(shí),光線會(huì)照射到窗口或線條。窗口允許光線通過(guò)磁盤(pán)到達(dá)另一側(cè)的光電傳感器,而線條則會(huì)阻擋光線。隨著磁盤(pán)旋轉(zhuǎn),編碼器模塊的輸出——通道A——是一系列高低信號(hào);信號(hào)的值取決于光電傳感器是否接收到光線(高)或沒(méi)有接收到光線(低)。
通道A的輸出波形如下所示:
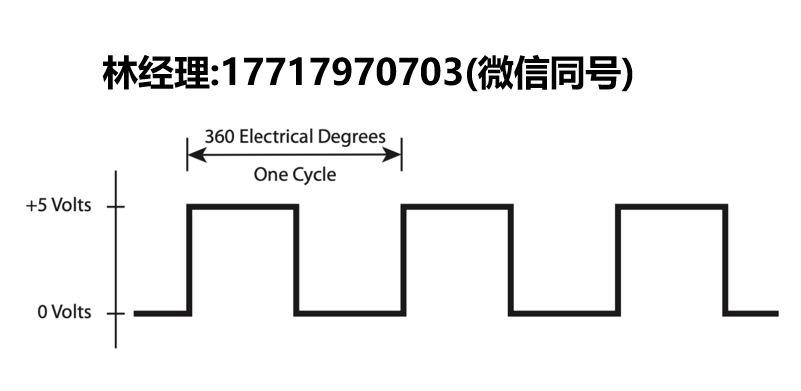
增量編碼器輸出波形
分辨率,當(dāng)應(yīng)用于光學(xué)編碼器時(shí),指定了每轉(zhuǎn)輸出信號(hào)變?yōu)楦唠娖降拇螖?shù)。這個(gè)數(shù)字可以與磁盤(pán)上的線條數(shù)量相匹配;或者,特別是在高分辨率的情況下,它可以是線條數(shù)量的倍數(shù)。(我們將在下面的可擴(kuò)展性部分進(jìn)一步討論這一點(diǎn)。)
磁盤(pán)上的線條數(shù)量始終與分辨率相關(guān)。典型值范圍從低數(shù)值如32或64到更高的分辨率,如5,000或10,000甚至更高。
下圖顯示了幾個(gè)編碼器磁盤(pán):左側(cè)是較低分辨率,右側(cè)是較高分辨率。
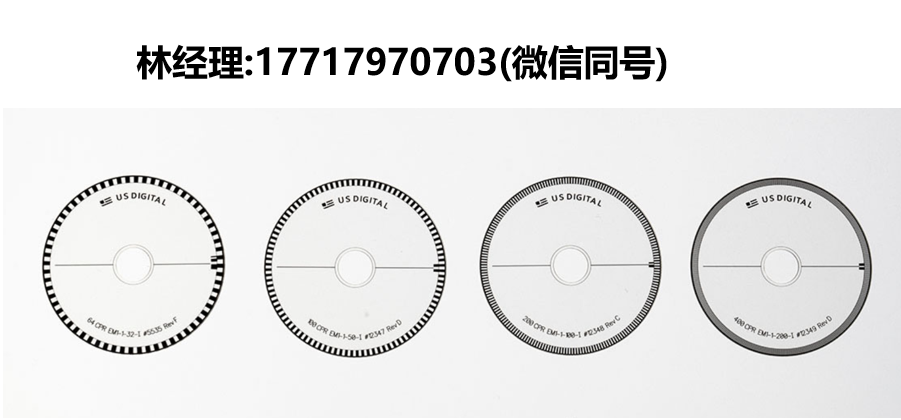
編碼器磁盤(pán)
編碼器的分辨率以**每轉(zhuǎn)周期數(shù)(CPR)**為單位進(jìn)行測(cè)量。周期這個(gè)詞既有物理意義,也有電氣意義。
-物理上,在磁盤(pán)上,一個(gè)周期由一條線和一個(gè)窗口組成;因此,在最基本的形式中,CPR與線條數(shù)量、窗口數(shù)量或線/窗口對(duì)的數(shù)量相同。
-電氣上,一個(gè)周期指的是編碼器輸出波形的一個(gè)完整周期:一個(gè)高脈沖和一個(gè)低脈沖。一個(gè)周期等于360°電氣角度。
因此,CPR可以指磁盤(pán)上的線條和窗口數(shù)量,或者每轉(zhuǎn)的電氣周期數(shù)。原生CPR在這兩種情況下是相同的數(shù)字,因?yàn)槊總€(gè)線/窗口對(duì)正是生成每個(gè)電氣周期的原因。
CPR還告訴我們可測(cè)量的最小距離。將360°機(jī)械角度除以每轉(zhuǎn)的周期數(shù),結(jié)果將是每個(gè)周期的機(jī)械角度。例如,對(duì)于分辨率為3,600 CPR的編碼器:
360°/轉(zhuǎn) = 0.1°/周期
3,600 周期/轉(zhuǎn)
雖然每轉(zhuǎn)周期數(shù)(CPR)是用于指定增量編碼器分辨率的常見(jiàn)術(shù)語(yǔ),但一些制造商使用諸如“每轉(zhuǎn)計(jì)數(shù)(CPR)”、“每轉(zhuǎn)脈沖數(shù)(PPR)”或“每轉(zhuǎn)位置數(shù)(PPR)”等術(shù)語(yǔ)。為了避免混淆,在本文中我們將使用每轉(zhuǎn)周期數(shù)(CPR)。
在下一節(jié)中,我們將使用PPR來(lái)表示每轉(zhuǎn)脈沖數(shù)——但在不同的上下文中:分辨率倍增。
分辨率倍增
磁盤(pán)的分辨率與物理現(xiàn)實(shí)相關(guān)——磁盤(pán)上的物理線條。在最基本的形式中,線條的數(shù)量就是分辨率。然而,運(yùn)動(dòng)控制器可以解釋由這些線條產(chǎn)生的輸出波形,并產(chǎn)生更高的分辨率——從同一個(gè)磁盤(pán)上。
增量編碼器通常使用正交編碼。制造商添加了另一個(gè)LED和光電傳感器,與第一個(gè)LED相隔90°電氣角度。請(qǐng)注意,90°電氣角度是1/4相位或象限——這就是正交名稱(chēng)的由來(lái)。
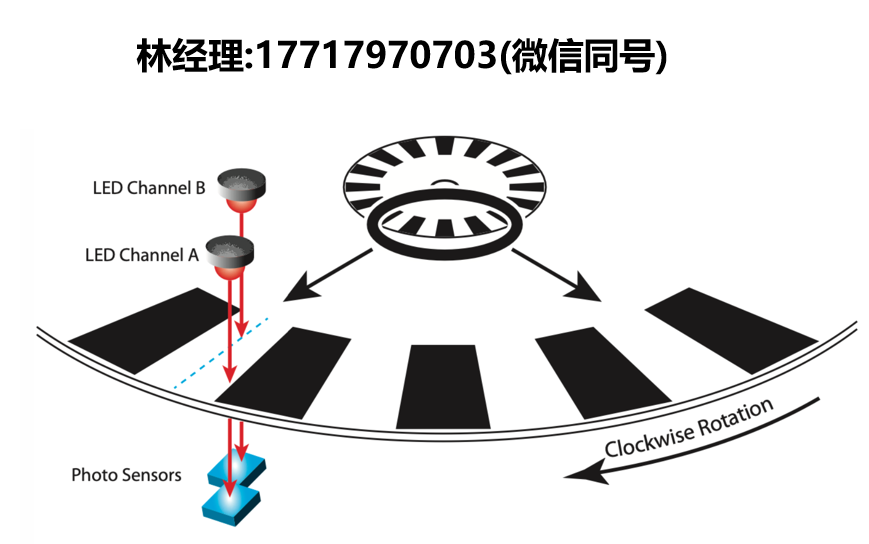
帶有2個(gè)光電傳感器和LED的編碼器磁盤(pán)
這產(chǎn)生了第二個(gè)輸出波形,通道B,與通道A相差90°電氣角度。
添加通道B帶來(lái)了兩個(gè)重要結(jié)果:
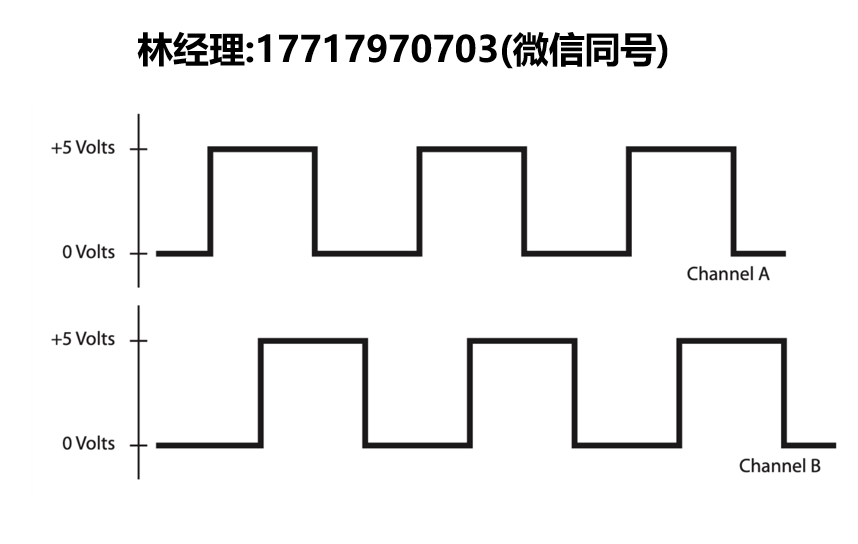
-方向現(xiàn)在可以確定:例如,“A領(lǐng)先B”可以表示順時(shí)針旋轉(zhuǎn)。
-更重要的是,與我們的討論相關(guān)——分辨率可以乘以2或4倍。
使用通道A和B的偏移波形實(shí)現(xiàn)4倍倍增
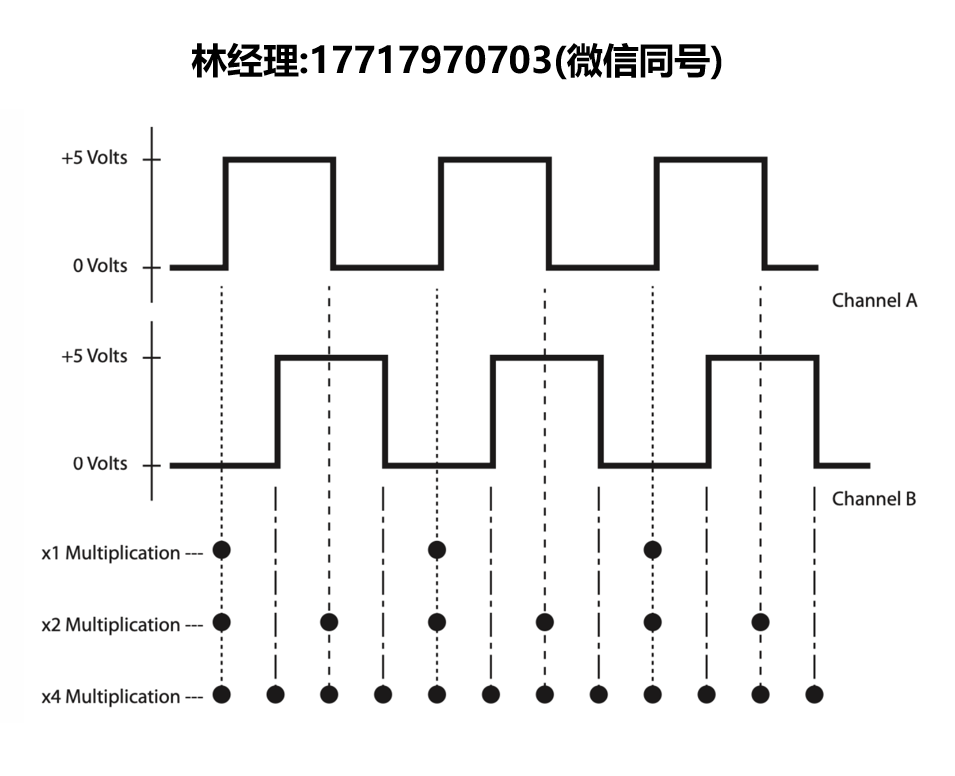
這被稱(chēng)為分辨率倍增。系統(tǒng)設(shè)計(jì)人員可以通過(guò)使用編碼器計(jì)數(shù)器接口芯片(如LS7183N)來(lái)實(shí)現(xiàn)這一點(diǎn)。
舉個(gè)例子,假設(shè)我們有一個(gè)磁盤(pán)上有100條線和窗口的編碼器。編碼器的分辨率為100 CPR。
x1——如果我們計(jì)算磁盤(pán)旋轉(zhuǎn)時(shí)每個(gè)通道A脈沖的上升沿,我們將得到100個(gè)脈沖/轉(zhuǎn)(100 PPR)。這與100 CPR的分辨率相同,正如預(yù)期的1倍倍增。
x2——如果我們計(jì)算通道A的每個(gè)上升沿和下降沿,我們將得到每個(gè)周期2個(gè)脈沖,總計(jì)200個(gè)脈沖/轉(zhuǎn)(200 PPR)。
x4——如果我們計(jì)算通道A和通道B的每個(gè)上升沿和下降沿,我們將得到每個(gè)周期4個(gè)脈沖,總計(jì)400個(gè)脈沖/轉(zhuǎn)(400 PPR)。
請(qǐng)注意,我們并沒(méi)有改變磁盤(pán)的分辨率;它仍然由每轉(zhuǎn)周期數(shù)決定。但通過(guò)以不同的方式解碼輸出波形,我們能夠獲得比磁盤(pán)上線條數(shù)量多4倍的脈沖/轉(zhuǎn)。
線性編碼器與分辨率
到目前為止,我們討論的所有關(guān)于分辨率的內(nèi)容也適用于增量線性編碼器。這是有道理的;線性編碼器使用線性條帶,相當(dāng)于沿半徑切割并拉直的圓形磁盤(pán)。線性編碼器的分辨率使用每英寸周期數(shù)(CPI)來(lái)表示,盡管有時(shí)也使用每英寸線數(shù)(LPI)。
絕對(duì)編碼器與分辨率
到目前為止,我們討論的是增量光學(xué)編碼器,其線條和窗口表示磁盤(pán)上的相對(duì)位置;每個(gè)線/窗口對(duì)看起來(lái)都與其他線/窗口對(duì)相同。它們彼此無(wú)法區(qū)分。重要的是當(dāng)每條線和窗口經(jīng)過(guò)傳感器時(shí)產(chǎn)生的高/低輸出轉(zhuǎn)換。
絕對(duì)編碼器的操作方式不同。它們?yōu)榇疟P(pán)上的每個(gè)位置輸出一個(gè)唯一的代碼——每個(gè)代碼都是絕對(duì)的,這意味著它與磁盤(pán)上的任何其他代碼不同,指定了磁盤(pán)上的唯一絕對(duì)位置。下圖顯示了一個(gè)傳統(tǒng)絕對(duì)編碼器的磁盤(pán)。它有四個(gè)軌道,以及一個(gè)LED陣列,傳感器從每個(gè)軌道讀取圖案。
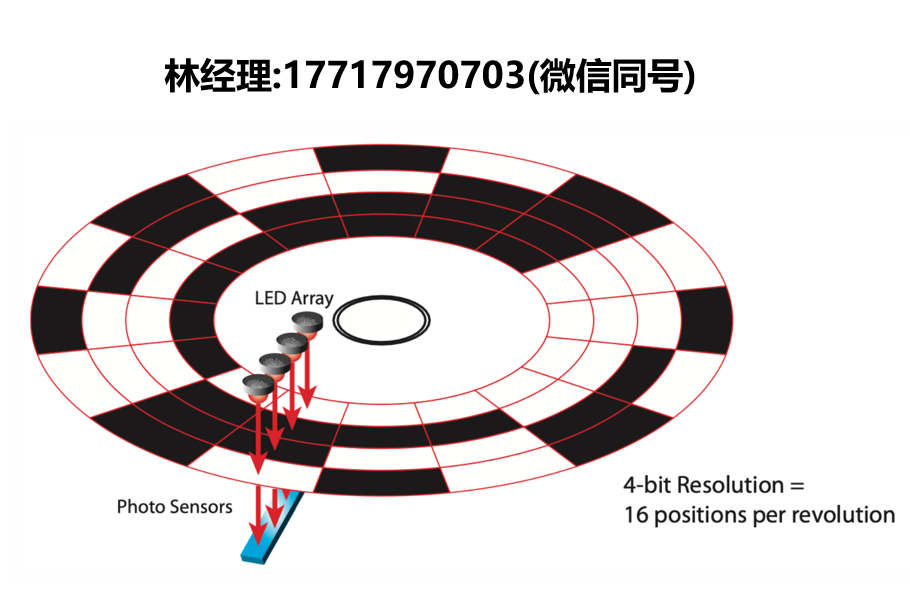
絕對(duì)編碼器的分辨率定義為磁盤(pán)旋轉(zhuǎn)360°時(shí)的每轉(zhuǎn)位置數(shù)。有時(shí)也使用等效術(shù)語(yǔ)每轉(zhuǎn)代碼數(shù)。
您經(jīng)常會(huì)看到絕對(duì)編碼器的分辨率以位數(shù)表示。例如,上圖中的磁盤(pán)具有4位分辨率,每個(gè)位置從四個(gè)軌道中的每一個(gè)產(chǎn)生一個(gè)位。更高的分辨率將需要更多的軌道;例如,10位分辨率將需要10個(gè)軌道。
在某些設(shè)計(jì)中,每個(gè)絕對(duì)編碼器都設(shè)置為一個(gè)特定的分辨率。然而,一些制造商采用不同的方法,制作具有單一帶的磁盤(pán),每個(gè)位置包含一個(gè)獨(dú)特的條形碼,如下圖所示。

帶有條形碼的絕對(duì)編碼器可以提供可編程分辨率:例如,一個(gè)12位編碼器(每轉(zhuǎn)4,096個(gè)位置)可以編程為輸出從2到4,096個(gè)代碼/轉(zhuǎn)。下表顯示了分辨率位數(shù)與每轉(zhuǎn)位置數(shù)以及每個(gè)位置的旋轉(zhuǎn)角度之間的關(guān)系。
分辨率(位)? ? ? ? ? ? ?每轉(zhuǎn)位置數(shù)? ? ? ? ? ? ? ?每個(gè)位置的旋轉(zhuǎn)角度
8位? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?256? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?1.41°
10位? ? ? ? ? ? ? ? ? ? ? ? ? ? ?1,024? ? ? ? ? ? ? ? ? ? ? ? ? ? 0.35°
12位? ? ? ? ? ? ? ? ? ? ? ? ? ? ?4,096? ? ? ? ? ? ? ? ? ? ? ? ? ?0.09°
對(duì)于12位絕對(duì)編碼器,請(qǐng)注意每個(gè)唯一位置占據(jù)磁盤(pán)圓周的不到1/10度,即不到6弧分。
絕對(duì)編碼器不使用正交編碼,因此沒(méi)有增量編碼器中可用的分辨率倍增等效功能。
可擴(kuò)展性:磁盤(pán)尺寸與編碼器分辨率
小型化是產(chǎn)品開(kāi)發(fā)中的一個(gè)強(qiáng)勁趨勢(shì)。設(shè)計(jì)人員通常試圖將更多功能集成到越來(lái)越小的封裝中。這導(dǎo)致了對(duì)微型編碼器的需求,以滿足尺寸減小的要求。減小編碼器尺寸是否會(huì)降低可用分辨率?對(duì)于傳統(tǒng)編碼器,答案是肯定的。
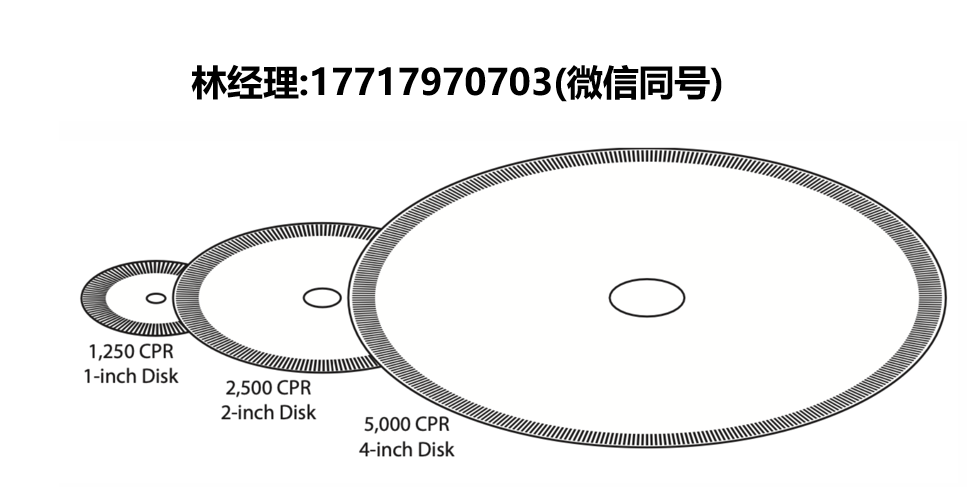
上圖顯示,對(duì)于傳統(tǒng)編碼器,高分辨率需要編碼器磁盤(pán)上有更多的線條。如果沒(méi)有足夠的空間容納這些線條,那么唯一的解決方案是制作更大的磁盤(pán)。要將分辨率提高一倍,您必須將磁盤(pán)的直徑增加一倍。
然而,隨著新技術(shù)的出現(xiàn),制造商可以在不增加磁盤(pán)尺寸的情況下提高磁盤(pán)的分辨率。這被稱(chēng)為可擴(kuò)展性,它非常適合小型化。
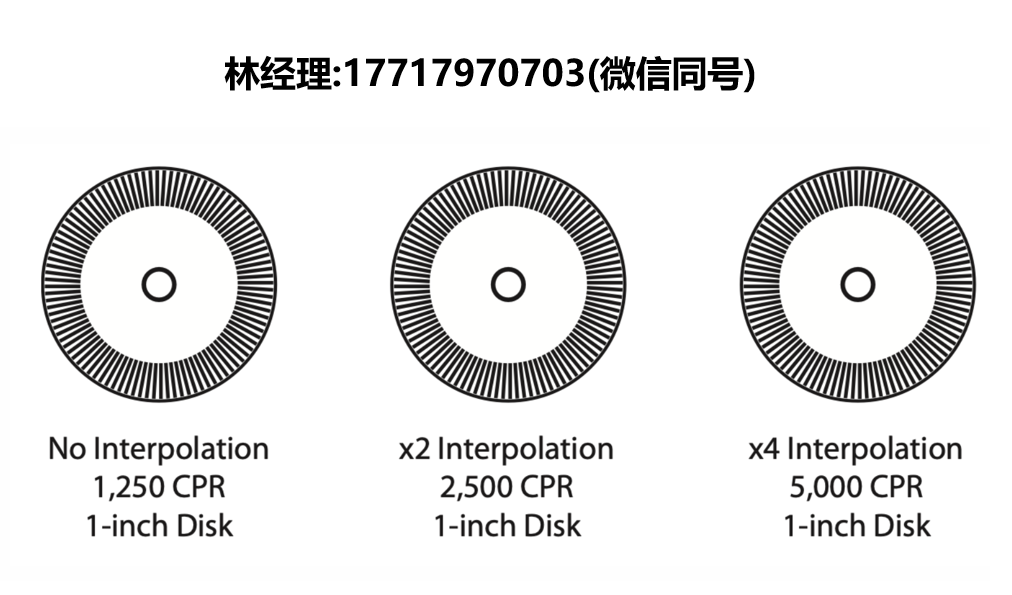
上圖顯示了一個(gè)1英寸的磁盤(pán),具有1,250條線(1,250 CPR)。通過(guò)電子插值技術(shù)(在編碼器內(nèi)部進(jìn)行的信號(hào)處理),CPR可以通過(guò)x2插值增加到2,500 CPR;通過(guò)x4插值增加到5,000 CPR。
在這個(gè)例子中,通過(guò)使用插值和可擴(kuò)展性,我們從同一個(gè)小型編碼器磁盤(pán)中實(shí)現(xiàn)了兩個(gè)越來(lái)越高的分辨率。
此外,使用分辨率倍增(前面討論過(guò)),5,000 CPR的編碼器可以被解碼為產(chǎn)生10,000個(gè)脈沖/轉(zhuǎn)(PPR)或20,000 PPR。
然而,并非所有編碼器技術(shù)都具有相同的可擴(kuò)展性:
–透射式光學(xué)編碼器——非常可擴(kuò)展
-反射式光學(xué)編碼器——非常可擴(kuò)展
-磁性編碼器——可擴(kuò)展
-電容式編碼器——不易擴(kuò)展
光學(xué)編碼器是最靈活的,最適合小型化。然而,對(duì)于電容式編碼器,可擴(kuò)展性要難得多;在大多數(shù)情況下,要獲得更高的分辨率,您必須購(gòu)買(mǎi)更大的編碼器——如果有的話。
插值是實(shí)現(xiàn)可擴(kuò)展性的一種絕佳方式,但也有其局限性。在越來(lái)越高的分辨率下,抖動(dòng)可能會(huì)成為問(wèn)題,波形對(duì)稱(chēng)性可能會(huì)受到影響。
如果您希望在小型封裝中獲得更高的分辨率,請(qǐng)與您的編碼器制造商合作。他們可能會(huì)為您提供定制解決方案,既能滿足您所需的分辨率,又能避免抖動(dòng)或電氣噪聲引起的信號(hào)退化。
您需要多少分辨率?
任何特定型號(hào)的編碼器都可能提供一系列分辨率。例如,快速調(diào)查制造商可能會(huì)顯示,單個(gè)編碼器提供20種不同的分辨率,范圍從64 CPR到10,000 CPR。
最佳實(shí)踐是否總是選擇最高分辨率?令人驚訝的是,答案是否定的。通常,最好評(píng)估您的應(yīng)用,并選擇能夠滿足您需求的最低分辨率——即使有更高的分辨率可用。
以下是一些高分辨率可能不是最佳選擇的原因:
-成本:更高的分辨率可能更昂貴。
-處理時(shí)間:讀取每個(gè)周期需要時(shí)間。更高的CPR = 更多時(shí)間。
-高速應(yīng)用:讀取每個(gè)周期的可用時(shí)間更短。
-抖動(dòng):敏感系統(tǒng)可能會(huì)對(duì)高分辨率信息過(guò)度響應(yīng)。
-尺寸:在某些情況下,更高的分辨率可能會(huì)影響尺寸。
分辨率與精度:預(yù)覽
在選擇分辨率時(shí),新手設(shè)計(jì)人員可能會(huì)查看可用分辨率范圍中的特定選項(xiàng),并說(shuō):“不,我需要比這更高的精度。”設(shè)計(jì)人員真正想表達(dá)的可能是:“我需要更高的分辨率。”
分辨率和精度:這兩個(gè)術(shù)語(yǔ)經(jīng)常被誤解并互換使用——但它們并不相同。有什么區(qū)別?我們將在下一節(jié)介紹精度,然后重新審視分辨率與精度之間的關(guān)系。
精度
編碼器旨在提供關(guān)于位置的反饋,這些反饋用于計(jì)算角度、距離和速度。當(dāng)您命令系統(tǒng)移動(dòng)并停在特定位置時(shí),您可能會(huì)想:編碼器是否從確切的目標(biāo)位置報(bào)告?或者它是否超出了目標(biāo)位置,或者未達(dá)到目標(biāo)位置?
精度是用來(lái)描述目標(biāo)位置與實(shí)際位置之間差異的術(shù)語(yǔ)。在理想情況下,它們應(yīng)該是相同的——但在現(xiàn)實(shí)世界中,存在差異。實(shí)際位置——編碼器實(shí)際所在的位置——可能與目標(biāo)位置相差一小部分,如編碼器精度規(guī)格中所示的范圍。
測(cè)量編碼器精度涉及一個(gè)細(xì)致的程序,需要精密校準(zhǔn)的設(shè)備。例如,您可以使用第二個(gè)高度精確的“校準(zhǔn)”編碼器來(lái)測(cè)量中等精度的編碼器。如果您記錄每個(gè)編碼器位置的目標(biāo)與實(shí)際位置,然后評(píng)估結(jié)果,您可以確定被測(cè)編碼器的精度。(如果您通過(guò)第二次或第三次旋轉(zhuǎn)評(píng)估編碼器,結(jié)果會(huì)相同嗎?請(qǐng)參見(jiàn)下面的精確度部分。)
對(duì)于旋轉(zhuǎn)編碼器,精度以度、弧分或弧秒為單位進(jìn)行測(cè)量。使用哪種單位取決于被測(cè)編碼器。對(duì)于低精度編碼器,度可能足夠;對(duì)于中等精度編碼器,使用分?jǐn)?shù)度或弧分;而對(duì)于超高精度編碼器,則可能使用弧秒。
例如,以下是一個(gè)絕對(duì)光學(xué)軸編碼器的規(guī)格:
典型值? ? ? ? ? ? ?最大值? ? ? ? ? ? ?單位
絕對(duì)精度? ? ? ? 0.18? ? ? ? ? ? ? ? ? 0.25? ? ? ? ? ? ? ? ?度
在這種情況下,編碼器的典型精度為0.18度,等于10.8弧分。
以下是另一個(gè)制造商對(duì)另一個(gè)編碼器(光學(xué)增量無(wú)軸模型)的精度規(guī)格:
典型值? ? ? ? ? ? ?最大值? ? ? ? ? ? ? 單位
位置誤差? ? ? ? ?10? ? ? ? ? ? ? ? ? ? 40? ? ? ? ? ? ? ? ? ? ? 弧分
該制造商使用位置誤差來(lái)表示精度,以弧分為單位。它是實(shí)際軸位置與編碼器周期計(jì)數(shù)指示的位置之間的角度差異。
這兩個(gè)編碼器的典型精度相似,大約為0.18度或10弧分。
誰(shuí)控制精度?——編碼器規(guī)格與系統(tǒng)精度
您可能會(huì)考慮評(píng)估編碼器的精度規(guī)格,但精度并不止于此。編碼器通常是更大運(yùn)動(dòng)控制系統(tǒng)的一部分。系統(tǒng)的非編碼器部分可能對(duì)整體系統(tǒng)精度產(chǎn)生重大影響。
編碼器制造商控制一些影響精度的因素,而最終用戶控制應(yīng)用特定的因素。
制造商控制的因素:
-圖案在磁盤(pán)上的位置:居中或偏心
-輪轂與磁盤(pán)的安裝
-磁盤(pán)與軸的安裝(對(duì)于軸式編碼器)
-光學(xué)元件的對(duì)齊
最終用戶控制的因素:
-編碼器磁盤(pán)與電機(jī)軸的安裝(對(duì)于編碼器套件)
-編碼器模塊的安裝(對(duì)于編碼器套件)
-編碼器與系統(tǒng)的耦合(對(duì)于軸式編碼器)
-安裝結(jié)構(gòu)的穩(wěn)定性/剛性
-齒輪公差和間隙
-電機(jī)軸承的游隙
-機(jī)械部件的軸向、徑向、側(cè)向等運(yùn)動(dòng)
-振動(dòng)、溫度、金屬疲勞、腐蝕等
從上面的部分列表中可以看出,編碼器精度的變化可能只是整個(gè)系統(tǒng)精度的一小部分。
您需要多少精度?
正如上面的列表所示,整個(gè)系統(tǒng)的精度可能遠(yuǎn)低于編碼器。在系統(tǒng)精度較低的應(yīng)用中,編碼器精度可能只需要單調(diào)性——隨著編碼器旋轉(zhuǎn),計(jì)數(shù)不斷增加或不斷減少。
單調(diào)計(jì)數(shù):…127…128…129…130…131…132…
非單調(diào)計(jì)數(shù):…127…128…129…128…132…131…
低精度編碼器可能成本較低,只要它提供可靠、單調(diào)的計(jì)數(shù),它可能就是您所需要的。
隨著整體系統(tǒng)精度的提高,可能需要中等精度的編碼器。對(duì)于大多數(shù)應(yīng)用來(lái)說(shuō),編碼器精度在0.1°或8-10弧分范圍內(nèi)是足夠的。上面討論的兩個(gè)示例編碼器都在這個(gè)范圍內(nèi),并且價(jià)格合理。
對(duì)于具有極其嚴(yán)格公差的應(yīng)用,可以使用精度規(guī)格為弧秒的高精度編碼器——但隨著精度的提高,成本也會(huì)相應(yīng)增加。
分辨率與精度:重新審視
回想一下在分辨率部分末尾提到的新手設(shè)計(jì)人員,他在選擇編碼器分辨率時(shí)說(shuō):“不,我需要比這更高的精度。”我們現(xiàn)在可以澄清分辨率和精度之間的常見(jiàn)混淆。
讓我們考慮一個(gè)制造商提供的兩種磁性絕對(duì)編碼器,一種具有12位分辨率,另一種具有10位分辨率。
從零開(kāi)始,以下是每個(gè)編碼器在磁盤(pán)旋轉(zhuǎn)時(shí)可以報(bào)告的前9個(gè)位置(以度為單位,部分?jǐn)?shù)字省略以便清晰):
12位? ? ? ? ? ? ? ? ? ? ? ? ? ?10位
0.000000? ? ? ? ? ? ? ? ?0.000000
0.09? ? ? ? ? ? ? ? ? ? ? ? ? ?…
0.18? ? ? ? ? ? ? ? ? ? ? ? ? ? …
0.351562? ? ? ? ? ? ? ? ? ?0.351562
0.45? ? ? ? ? ? ? ? ? ? ? ? ? ? …
0.54? ? ? ? ? ? ? ? ? ? ? ? ? ? …
0.63? ? ? ? ? ? ? ? ? ? ? ? ? ? …
0.703125? ? ? ? ? ? ? ? ? ?0.703125
12位編碼器可以報(bào)告4,096個(gè)位置/轉(zhuǎn),是10位編碼器1,024個(gè)位置的4倍。在0.0位置之后,12位編碼器報(bào)告其第四次讀數(shù)時(shí),10位編碼器才報(bào)告其第一次讀數(shù)。
那么哪個(gè)編碼器更精確?以下是制造商在編碼器數(shù)據(jù)表中的說(shuō)明:
“雖然兩個(gè)編碼器的精度相同,但12位版本提供了更高的分辨率。”
精度是相同的。這個(gè)例子表明,精度和分辨率是彼此獨(dú)立的。一個(gè)術(shù)語(yǔ)——精度——描述了目標(biāo)位置與實(shí)際位置之間的差異。另一個(gè)術(shù)語(yǔ)——分辨率——描述了磁盤(pán)的細(xì)分程度。這些是獨(dú)立的屬性。
如果我們的新手設(shè)計(jì)人員需要一個(gè)能夠每十分之一度報(bào)告位置的編碼器,那么設(shè)計(jì)人員需要的是更高的分辨率,而不是更高的精度——12位編碼器將是一個(gè)不錯(cuò)的選擇。
精確度
正如我們?cè)诰炔糠种锌吹降模瑸榱舜_定編碼器的精度,我們可以將編碼器旋轉(zhuǎn)360°并記錄每個(gè)編碼器計(jì)數(shù)位置的精度——目標(biāo)位置與實(shí)際位置之間的角度差異。
如果我們第二次旋轉(zhuǎn)并再次測(cè)量精度會(huì)發(fā)生什么?我們是否在每個(gè)位置獲得相同的位置誤差?第三次、第四次或第五次旋轉(zhuǎn)后呢?位置誤差是否可重復(fù),或者是否變化?
精確度是描述測(cè)量重復(fù)性的術(shù)語(yǔ)。它是連續(xù)測(cè)量之間的差異量。
考慮兩個(gè)射箭運(yùn)動(dòng)員在比賽中射出的箭。哪個(gè)運(yùn)動(dòng)員更準(zhǔn)確?

令人驚訝的是,兩個(gè)目標(biāo)的平均精度相似。左側(cè)所有箭的平均位置在靶心的中心,與右側(cè)緊密分組的箭相同。兩者之間的區(qū)別在于射擊的精確度。左側(cè)的組是準(zhǔn)確的,但不精確。右側(cè)的組既準(zhǔn)確又精確。
現(xiàn)在讓我們看看另外兩個(gè)射箭運(yùn)動(dòng)員射出的箭。哪個(gè)運(yùn)動(dòng)員更精確?

兩個(gè)運(yùn)動(dòng)員的精確度相同。左側(cè)的箭是精確的——但它們不準(zhǔn)確。右側(cè)的組再次既準(zhǔn)確又精確。
精確度的應(yīng)用
精確度是連續(xù)測(cè)量之間的差異量。具有可重復(fù)位置誤差的編碼器可能具有良好的精確度,即使它可能不是完全準(zhǔn)確的。在這種情況下,可以使用精確度來(lái)補(bǔ)償編碼器的不準(zhǔn)確性。
例如,讓我們看看兩個(gè)編碼器的連續(xù)測(cè)量結(jié)果。目標(biāo)軸角度為45.00°。
測(cè)量編號(hào)? ? ? ? ? ? ?目標(biāo)軸角度? ? ? ? ? 編碼器1實(shí)際軸角度? ? ? ? ?編碼器2實(shí)際軸角度
1? ? ? ? ? ? ? ? ? ? ? ? ? ? 45.00°? ? ? ? ? ? ? ? ? 44.20°? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 45.80°
2? ? ? ? ? ? ? ? ? ? ? ? ? ?45.00°? ? ? ? ? ? ? ? ? ?44.30°? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?44.20°
3? ? ? ? ? ? ? ? ? ? ? ? ? ?45.00°? ? ? ? ? ? ? ? ? ?44.25°? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?44.30°
4? ? ? ? ? ? ? ? ? ? ? ? ? ?45.00°? ? ? ? ? ? ? ? ? ?44.20°? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 44.25°
5? ? ? ? ? ? ? ? ? ? ? ? ? ?45.00°? ? ? ? ? ? ? ? ? ?44.30°? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?45.75°
每個(gè)編碼器的位置誤差約為0.75°,但雖然編碼器2的誤差沒(méi)有可重復(fù)的模式,編碼器1更精確——它的誤差始終為-0.75°,平均而言。
編碼器1的精確度可以很好地利用。可以在每個(gè)位置記錄誤差,并使用這些測(cè)量值來(lái)補(bǔ)償編碼器報(bào)告的位置。例如,將0.75°添加到上表中的每個(gè)測(cè)量值,將報(bào)告以下位置:
測(cè)量編號(hào)? ? ? ? ? ? ?目標(biāo)軸角度? ? ? ? ? ? ?編碼器1實(shí)際軸角度? ? ? ? ? ?編碼器1補(bǔ)償軸角度
1? ? ? ? ? ? ? ? ? ? ? ? ? ? ?45.00°? ? ? ? ? ? ? ? ? ? ?44.20°? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 44.95°
2? ? ? ? ? ? ? ? ? ? ? ? ? ? 45.00°? ? ? ? ? ? ? ? ? ? ?44.30°? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?45.05°
3? ? ? ? ? ? ? ? ? ? ? ? ? ? 45.00°? ? ? ? ? ? ? ? ? ? ?44.25°? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?45.00°
4? ? ? ? ? ? ? ? ? ? ? ? ? ?45.00°? ? ? ? ? ? ? ? ? ? ? 44.20°? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?44.95°
5? ? ? ? ? ? ? ? ? ? ? ? ? ?45.00°? ? ? ? ? ? ? ? ? ? ? 44.30°? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?45.05°
編碼器1現(xiàn)在將報(bào)告一個(gè)補(bǔ)償位置,與實(shí)際位置的偏差在0.05°以內(nèi),這比其未補(bǔ)償?shù)钠骄x數(shù)-0.75°要精確得多。
事實(shí)上,這種補(bǔ)償技術(shù)用于制造高精度編碼器。這些編碼器按照標(biāo)準(zhǔn)制造,確保無(wú)論它們有什么誤差,都是可重復(fù)的。它們的精確度用于創(chuàng)建誤差補(bǔ)償?shù)牟檎冶恚摫響?yīng)用于編碼器報(bào)告的每個(gè)位置。
整個(gè)系統(tǒng)的精確度
精確度的概念適用于運(yùn)動(dòng)控制系統(tǒng)的每個(gè)組件,而不僅僅是編碼器。例如,考慮一個(gè)定長(zhǎng)切割應(yīng)用。編碼器連接到驅(qū)動(dòng)滾珠絲杠和執(zhí)行器的電機(jī),執(zhí)行器定位電線進(jìn)行切割。
假設(shè)系統(tǒng)設(shè)置為在12.00英寸處切割電線。切割前4根電線后,測(cè)量結(jié)果如下:
11.81英寸
11.82英寸
11.80英寸
11.81英寸
電線始終短約0.20英寸。誤差來(lái)自哪里?它可能來(lái)自系統(tǒng)的任何地方——或者所有地方:編碼器本身、電機(jī)、滾珠絲杠螺紋中的游隙或線性滑軌軸承中的游隙。
由于讀數(shù)之間的差異很小,系統(tǒng)具有良好的精確度。這可以用于校準(zhǔn)應(yīng)用;可以將0.20英寸添加到最終目標(biāo)位置12.00英寸,以達(dá)到12.20英寸的補(bǔ)償位置。當(dāng)電線被切割時(shí),它們將非常接近所需的12.00英寸長(zhǎng)度。
結(jié)論
我們討論了與編碼器相關(guān)的三個(gè)最重要的概念。
分辨率——編碼器每轉(zhuǎn)的周期數(shù)或每英寸的周期數(shù)
精度——目標(biāo)位置與實(shí)際報(bào)告位置之間的差異
精確度——重復(fù)測(cè)量之間的差異
雖然這些術(shù)語(yǔ)看起來(lái)可以互換,但它們實(shí)際上是相互獨(dú)立的。理解分辨率、精度和精確度將幫助您在選擇編碼器時(shí)做出決策。

http://ydzhly.com/us-digital/US digital編碼器,編碼器的分辨率,精度,精確度/
https://www.bilibili.com/opus/1024388376283840516